人工智能(AI)的进步开启了自动化机器人技术的新纪元,使机器人能够适应复杂多变的环境。
过去几十年间,机器人技术虽取得显著进展,但仍面临潜力未完全释放的挑战。传统机器人通常依赖预设指令和固定配置,难以应对突发状况。而融合了认知、分析、推理与决策能力的AI技术,正赋予机器人智能化操作能力,大幅提升其辅助人类的效能。
通过将AI技术融入机器人工程系统,我们有望在工业、农业、物流、医疗等领域实现更广泛的应用,使机器人能以更高自主性和效率完成复杂任务。这种技术升级不仅释放了机器人在现实场景的应用潜力,为医疗和环境问题提供解决方案,更推动工业4.0时代的智能制造范式转型。
AI驱动的创新机器人系统
在香港理工大学机械工程系智能机器人及自动化讲座教授、理大-南京科技创新研究院院长张丹教授的带领下,研究团队利用AI技术开发出多款高性能动态机器人系统。
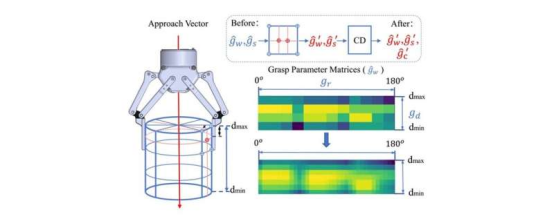
该团队最新提出的抓取姿态检测框架,采用深度神经网络生成六自由度(6-DoF)全向高精度抓取方案。通过卷积神经网络(CNN)对多尺度圆柱体进行物体检测,精确获取目标物体的几何信息与尺寸定位。
多层感知机(MLP)集群协同优化机械臂抓取参数,包括夹爪宽度、抓取评分(针对特定平面旋转角度与夹爪深度)及碰撞检测。这些参数输入框架算法后,可将预设抓取配置扩展为适应场景的完整抓取方案。实验数据显示,该方法在实验室模拟中的平均成功率达84.46%,优于基准方法的78.31%。
智能康复外骨骼突破
研究团队还将AI技术应用于膝关节康复外骨骼的创新设计。该外骨骼包含电动驱动的主动屈伸机构、承重踝关节以及刚度调节装置。通过长短期记忆网络(LSTM)处理肌电信号与膝关节运动数据,实现符合人体生物力学特性的实时非线性刚度与扭矩调节。
基于径向基函数(RBF)网络的自适应控制算法,使外骨骼无需力/扭矩传感器即可自动调节关节角度与刚度参数,显著提升位置控制精度与步态适应性。实验证明,这种数据驱动方法在准确性和实时响应上均优于传统固定控制模式,能为不同步行速度用户生成理想关节轨迹。
技术融合的未来前景
张丹教授团队的研究表明,深度学习等AI技术显著提升了机器人对环境感知与理解的能力,为突破固定场景任务限制提供了更灵活的解决方案。AI与机器人技术的融合不仅提高了作业精度,更赋予机器人实时决策与持续学习的新能力。这种自我进化特性将推动机器人在社会各领域的深度应用,为人类未来探索开辟新可能。
精选文章: